Circular Restricted Three-Body Problem¶
By letting \(m_3 \rightarrow 0\) then Equation (10)-(11) as derived from the Jacobian Coordinate Frame section simplifies to take on a similar form as the Two-Body Problem.
Many import results can be derived from this general form such as the analysis of the relative motion of the International Space Station, satellites, asteroids etc. among the Earth-Moon system.
Force Potential¶
Next, we can setup the total force potential as:
so that
In many scenarios, assume \(|\mathbf{R}|\) is constant such that \(P_1\) and \(P_2\) are in mutual circular orbit. This is certainly a valid assumption for systems such as Earth-Moon, or the Earth-Sun.
The Rotating Frame¶
In a rotating coordinate frame, the position vector for the Three-Body system can be represented as:
where \(n\) is the mean motion of the primary body system.
Shift the coordinate system to a rotating frame so that \(\mathbf{R}\) is stationary along the local x-coordinate axis (\(\hat{\mathbf{x}}_R\)).
For example, consider the Earth-Moon system, the x-coordinate axis is always pointing from the Earth to the Moon and is rotating at a rate of \(\mathbf{n}\):
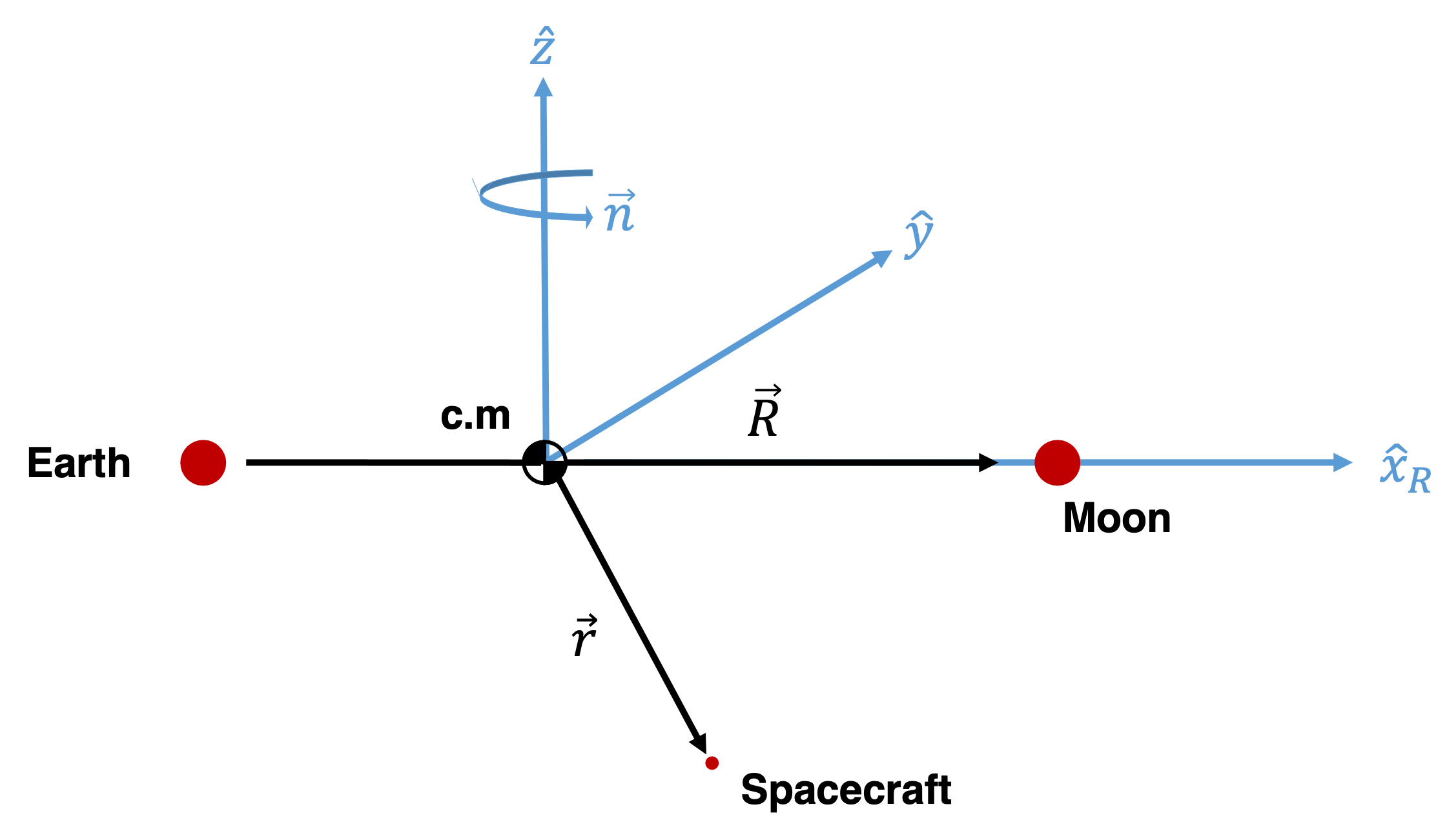
Figure 1.3 Jacobi Coordinate Frame Shifted to The Rotating Frame¶
The angular velocity (\(\Omega\)) for this system is defined as:
It is useful to relate the inerital position vector (\(\mathbf{r}_I\)) to the rotational vector (\(\mathbf{r}_R\)):
The velocity in the inertial frame is:
The acceleration in the inertial frame is:
Important
Note that \(\dot{\Omega} = 0\) since we assumed the orbit is circular. In other words \(n\) is constant.
Let \(\mathbf{r}_R\) be the position in the rotating coordinate frame. \(\mathbf{R}_R = \mathbf{r}\)
We can rewrite Equation (9) as:
Equations of Motion¶
As part of the rotating coordinate frame, it is convenient to write Equation (10) in vector form by breaking [\(2n\mathbf{\hat{z}}\times\dot{\mathbf{r}}\)] and [\(n^2\mathbf{\hat{z}} \times \left( \mathbf{\hat{z}} \times \mathbf{r}\right)\)] into their components.
Thus, the set of equations of the Three-Body Problem for the circular restricted problem in the rotating coordinate frame are:
Note
The components of [\(2n\mathbf{\hat{z}}\times\dot{\mathbf{r}}\)] are usually referred to as the tidal terms in Astrodynamics. Think of this as \(P_2\) orbits \(P_1\) every orbital period there is a force experience directly as a function of \(n\)
Simplifying The Equations of Motion¶
Equations (11) represent where the spacecraft is relative to the Jacobian Coordinate frame. Figure 1.4 below shows an updated frame of reference:
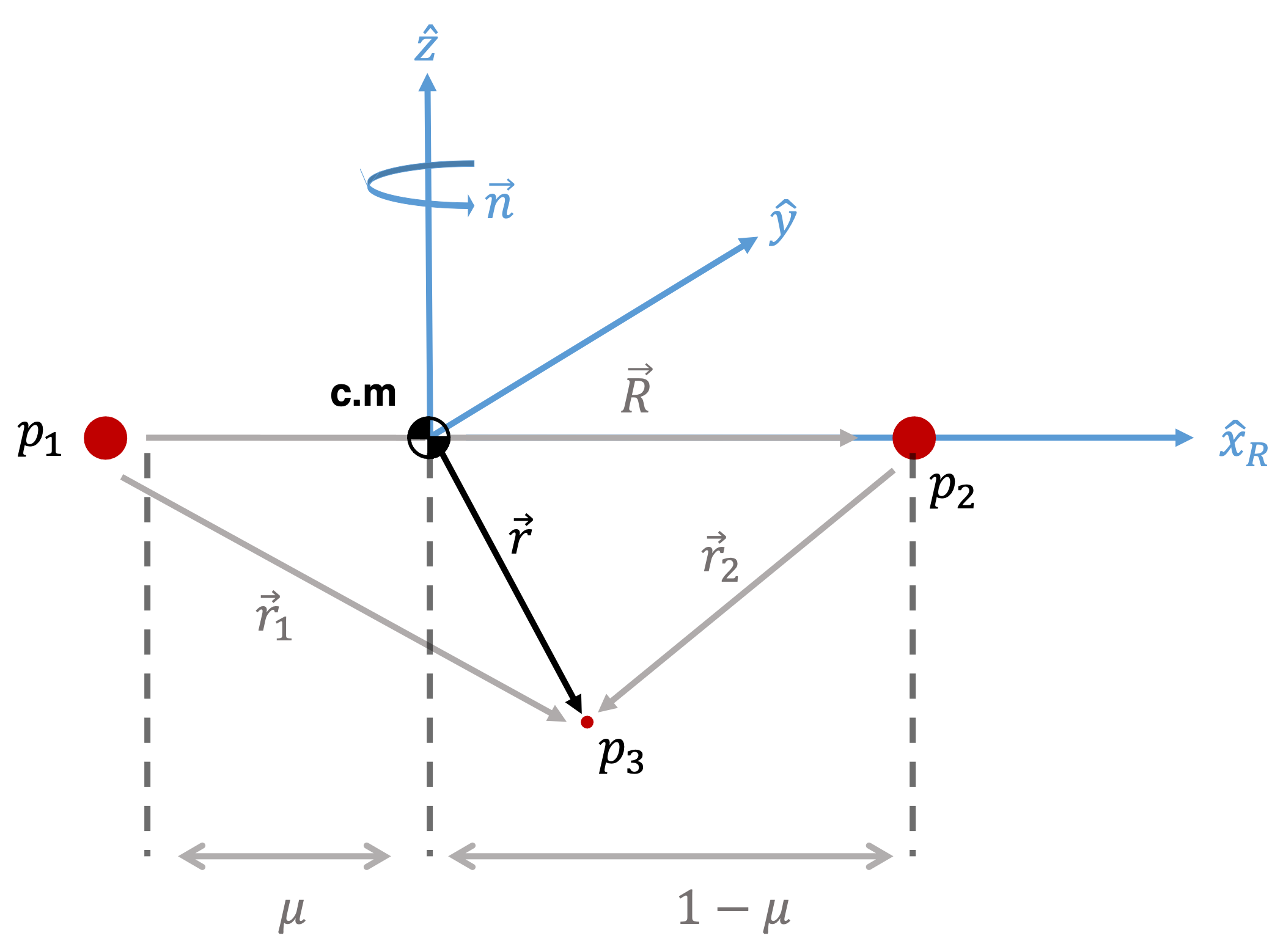
Figure 1.4 Circular Restricted Three-Body Problem in the Rotating Frame¶
Note
In Astrodynamics the mass ratios are generally defined as:
The total force potential (2) for this system can be rewritten as:
Let us write this a bit more concisely by defining a new force potential as \(\mathbf{V}\) in order to simplify our equations of motion Equation (11):
where \(r_1\) and \(r_2\) are:
Note
The potential energy is made up of three components
The potential energy due to the force induced by the rotating reference frame
The gravitational potential energy from \(P_1\)
The gravitational potential energy from \(P_2\)
Figure 1.5 below is an example of solving Force Potential (14) for the Earth-Moon system. The figure is interactive and generated using Plotly, an open-source graphing library for Python. The reader is encouraged to interact with Figure 1.5 using their mouse to zoom into the region of space around the bodies and rotate the surface to inspect the potential wells.
Equations of Motion¶
Finally, the generalized equations of motion for the Circular Restricted Three-Body Problem are: